Lorem ipsum dolor sit amet, consectetur adipiscing elit. Nunc odio purus, tempus non condimentum eget, vestibulum.
Across my teaching, research, and installations, I’ve pursued an open-source agenda that encourages designers, artists, and engineers to treat interactive environments as shared, evolving ecologies rather than fixed products. My projects challenge the top-down control systems typical of the technology industry, favouring participatory, emergent, and community-driven approaches.
In Balls! built for Arup Engineers, the interface became a platform for dialogue and negotiation between residents, inviting them to re-programme and repurpose their own workplace. Scorpion (with the Interactive Architecture Lab) expanded access to robotic construction through adaptive, open-source programming tools, while Golem explored low-cost, modular 3D-printed components to democratise kinetic design.
These projects embody a belief that knowledge should circulate, mutate, and grow in public. They draw inspiration from thinkers and practitioners who have promoted open systems and participatory infrastructures — from Usman Haque’s Open Source Architecture to Cedric Price’s cybernetic driven architectures, to Buckminster Fuller’s anticipatory design ethos. Open-source practice, in this light, is not only a technical model but an ethical and aesthetic stance: a way to animate spaces collectively and sustain a living culture of shared invention.

Balls! was conceived as an interface for open dialogue between architects, engineers, and occupants within Arup’s global headquarters. Developed as both installation and experiment, it invited residents to directly engage with the design of their own environment—taking control of a dynamic system rather than being passively managed by it. Through a series of public workshops, staff were encouraged to reprogram and repurpose the installation, negotiating use between teams and departments. The project challenged conventional top-down building management systems, proposing instead a model of participatory authorship grounded in open-source design principles. By foregrounding transparency, shared code, and collective agency, Balls! turned a corporate atrium into a living laboratory—one that animated social interaction, encouraged creative misbehaviour, and demonstrated how architecture can become more responsive, adaptive, and human when users are invited to shape it themselves.
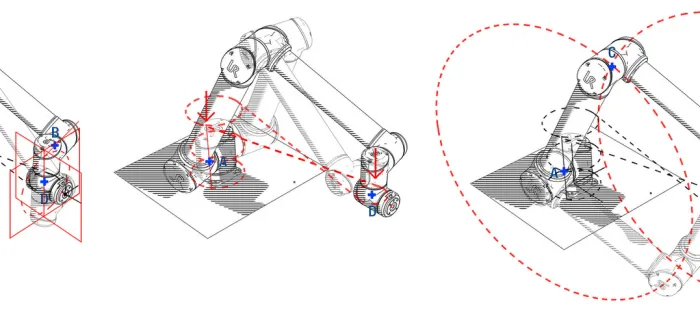
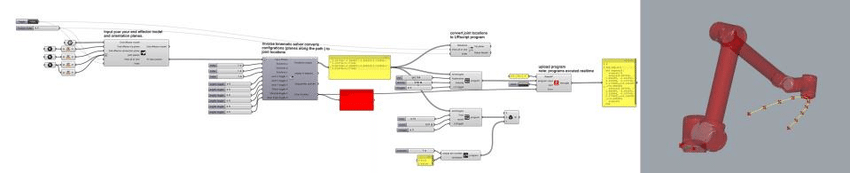
Scorpion explored how open-source tools could expand access to robotic fabrication within architectural design. Developed at the Interactive Architecture Lab, it introduced a novel “adaptive programming” approach, allowing designers to teach robotic arms behaviours through simple, modular scripts rather than complex proprietary software. The project combined motion capture, vision sensing, and feedback control to enable responsive construction processes that could adjust in real time to material behaviour and human collaboration. Published as an open Grasshopper plug-in and distributed through an online community of practitioners, Scorpion broke down barriers to experimentation with industrial robotics. Its ambition was not automation for efficiency, but autonomy for creativity—transforming robots from closed industrial machines into accessible, collaborative design partners. In doing so, it demonstrated how open-source platforms can democratise high-end fabrication and foster collective innovation across disciplines and institutions.
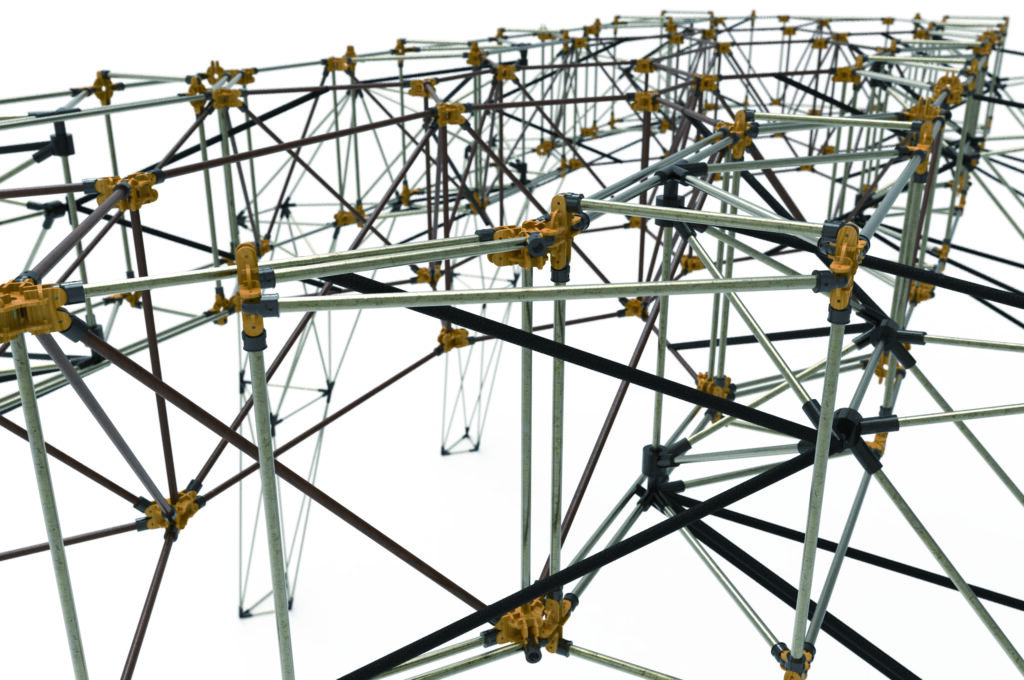
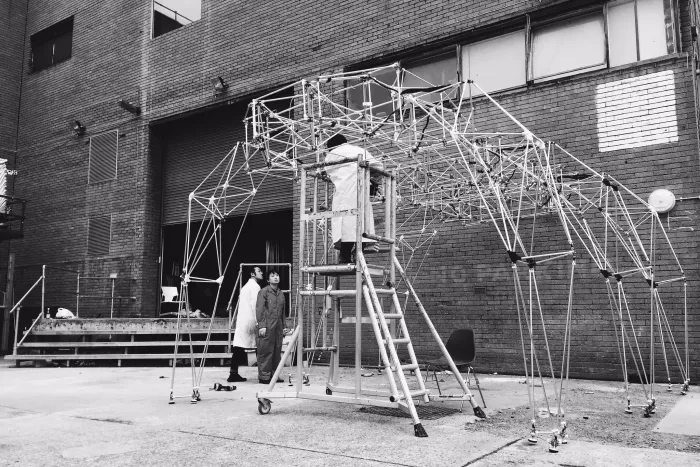
Golem was developed by the Interactive Architecture Lab as a modular, open-source system for kinetic structures. It combined low-cost 3D printing, accessible microcontrollers, and everyday materials to prototype complex motion and adaptive form without industrial equipment. The project invited students and makers to experiment with actuation, balance, and morphology—building from shared online kits and parametric design files. Each participant could remix components, contributing new joints, linkages, and control strategies to a growing repository of collective invention. The resulting structures were lightweight yet expressive, performing choreographies of movement that felt alive and unpredictable. Beyond its technical achievement, Golem proposed an ethics of making rooted in reuse, transparency, and collaboration. It embodied the idea that innovation in kinetic architecture need not rely on expensive proprietary systems but can emerge from distributed, creative communities working in open dialogue.
All of my teaching is grounded in open-source tools and cultures of shared learning—from Processing and Arduino to Grasshopper, Python, and the Robot Operating System (ROS). I seeopen-source platforms not simply as free software, but as a philosophy of collective invention: a way of learning through transparency, remix, and contribution. Students are encouraged to prototype with open frameworks like TouchDesigner, Blender, and TensorFlow, and to share their own code, methods, and insights back with the wider community. This reciprocal approach—using and giving back—situates design as a public, evolving practice rather than a proprietary craft. For example, the below image shows is the first ever UK workshop on openFrameworks. Held at UCL in 2009, it was free to the public seeding numerous collaborations in London’s creative coding community in the years that followed.
